创造机器人来安全地援助灾民是一项挑战;另一种方法是利用材料的柔软性来执行灵活的机器人控制。使用柔韧的软材料与人类协作以及在灾区工作最近引起了人们的广泛关注。然而,控制实际应用的软动力学仍然是一个重大挑战。
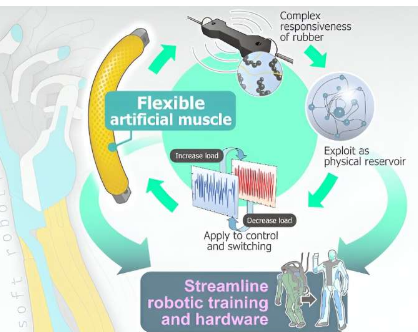
京都大学与东京大学和普利司通公司合作,现已开发出一种控制气动人造肌肉(软机器人执行器)的方法。这些驱动组件的丰富动态可以用作计算资源。该工作发表在《先进科学》杂志上。
京都大学信息学研究生院的 Nozomi Akashi 解释说:“我们已经证明了执行器能够自主生成多种动态,包括节奏模式和混乱。”
传统上,模式是通过在机器人外部连接振荡器来生成的,从而实现运动和重复运动。然而,这些振荡器应该从机器人上移除以保持其柔软度。明石的团队解决了这个难题,以发挥软机器人的潜力。
东京大学信息科学与技术研究生院的 Kohei Nakajima 表示:“此外,改变模式的分叉结构可以嵌入到机器人执行器本身中。”
研究结果表明,机器人可以在学习数据之外生成质量不同的模式,这为开发能够更具适应性和灵活运动的机器人铺平了道路。
“这可以简化硬件和软件开发流程,使其更加高效和有效,”Akashi 总结道。